[VIP第1年] 指数:3
[VIP第1年] 指数:3
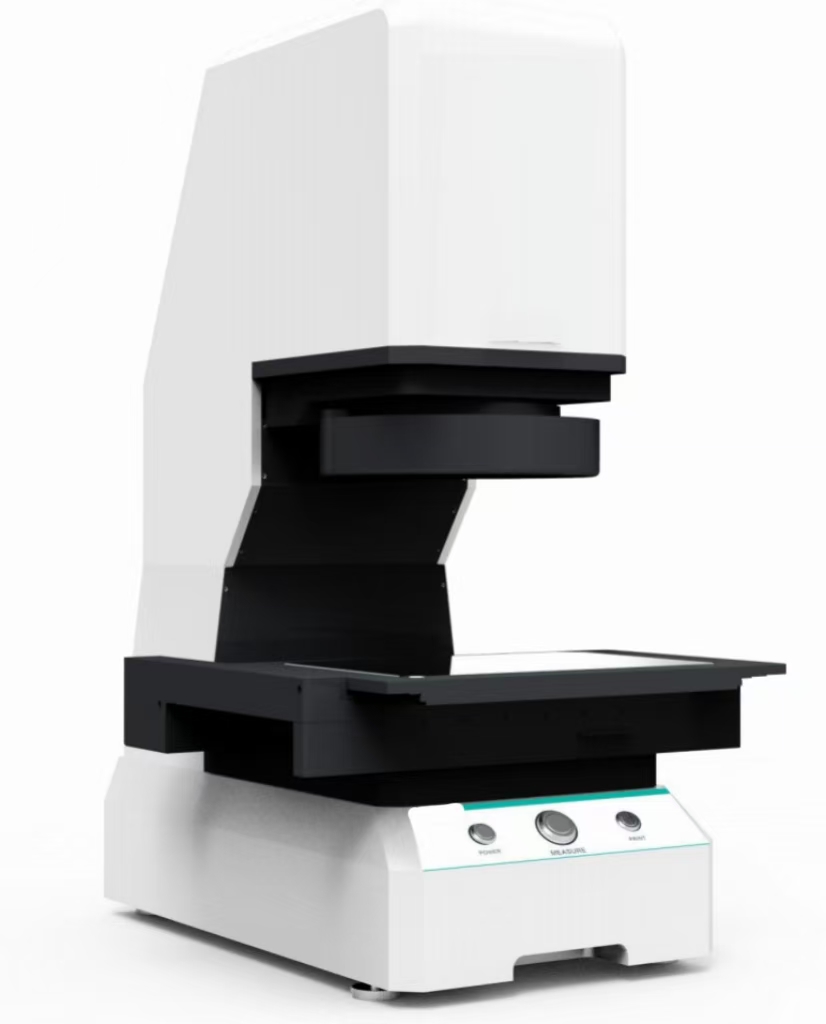
科研仪器集成化的基本是采用标准件,实现定制和非标仪器系统的搭建(2018年由黑龙江大学刘书钢教授与中国科学院大学史祎诗教授共同提出),图1就是集成化仪器的一个典型案例。图1采用标准件的形式,搭建出一台科研测量级别的偏振光方向检测仪,采用了黑龙江大学的发明()技术。搭建的系统具有简洁、有基准、稳定,可以实现整个系统一体化等优点,静安区光学导航公司联系电话。(图中光学机械件全部由锐光凯奇提供)该系统的全部零件通过钨钢笼杠连接成为一体,静安区光学导航公司联系电话,对外界环境的影响能够减少到小,这使得仪器集成化成为可能。而目前业界还基本完成不了整个系统的集成化功能,可以提供子系统(全部系统中的一个部分),静安区光学导航公司联系电话。科研仪器集成化由于技术门槛比较高,目前还未在公开报道中报道了国内外企业可以实现这个功能,作者希望通过此文以飨读者,与同行交流。光学系统的搭建基础是什么光学系统的构成其实是一个典型的光、机、电+控制的组合,下边分别简单介绍。1.基本光学元件的功能组成仪器系统的基本光学元件如图2所示,可以大致分为透镜、棱镜、反射镜、滤光片、偏振片、衰减片、物镜、光源、传感器、光谱仪(可以归结到传感器,由于它的功能性比较强,单独列出)等等。湖南光学导航系统费用,可以咨询位姿科技(上海)有限公司;静安区光学导航公司联系电话
则根据同一时刻两摄像头所拍摄的图像的不同,可以确定这该点在空间中的位置。光学式位置追踪的主要缺点也是其受视线阻挡的限制,此外,由于其需要对图像进行分析处理,计算量比较大,对处理速度要求较高。3、电磁式位置追踪系统(Ascension位置追踪系统),系统主要由电磁发射部分和电磁接收传感器及信号数据处理部分组成。在目标物体附近安置一个由三轴相互垂直的线圈构成的磁场信号发生器,磁场可以覆盖周围一定的范围,接收传感器也由三轴相互垂直的线圈构成,其可以检测磁场的强度,并将检测的信号经处理后送到数据处理部分,信号处理部分经过处理计算就能得出目标物体的六个自由度,即它不但可以获得目标物体的位置信息,还可以获得其角度姿态信息,这些定位信息在实际中是十分重要的。另外,电磁位置追踪的突出优点就是不受视线阻挡的限制,可以在空间中自由移动。但是电磁位置追踪也有缺点,它易受周围电磁环境的干扰,且对金属物体较为敏感。电磁位置追踪系统由于不受视线阻挡,所以可广泛应用于医疗导航、生物力学、运动分析和飞行员头盔定位等领域中。电磁位置追踪系统因其独特的优点,以及在虚拟现实和其它方面中的更加广阔的应用前景,目前世界各国都十分重视。静安区光学导航公司联系电话湖北光学导航系统费用,可以咨询位姿科技(上海)有限公司;
小尺寸、近距离光学定位仪:PSTPico光学追踪/光学测量/光学追踪高精度、小容积光学追踪PSTPico是PST红外光学定位产品系列中小的成员。它配备了两个高清红外摄像机,可提供小尺寸近距离定位测量和高精度6自由度追踪。它只有一副眼镜那么大,是适用于小空间应用或集成的理想解决方案。source:(设备中心点)5cm处开始定位追踪,同时拥有广阔的视域,几乎可达180度。PSTPico是理想的用户交互定位仪,可以放置于监视器上、小型仿真模拟器上、或其它任何需要在非常近距离内集成定位的设备上。PSTPico产品规格小追踪距离:5厘米比较大追踪距离:、无噪音六自由度追踪,无需校准视域广阔,可达180度可调式红外闪光帧速率可调至50赫兹。
自动光圈电动变焦镜头与自动光圈定焦镜头相比增加了两个微型电机,其中一个电机与镜头的变焦环合,当其转动时可以控制镜头的焦距;另一电机与镜头的对焦环合,当其受控转动时可完成镜头的对焦。但是由于增加了两个电机且镜片组数增多,镜头的体积也相应增大。电动三可变镜头与自动光圈电动变焦镜头相比,只是将对光圈调整电机的控制由自动控制改为由d2c0ca8a-f532-4205-9366-8来手动控制。按焦距分类(约50度左右),广角镜头和特广角镜头(100-120度)标准镜头视角约50度,也是人单眼在头和眼不转动的情况下所能看到的视角,所以又称为标准镜头。5mm相机的标准镜头的焦距多为40mm,50mm或55mm。120相机的标准镜头焦距多为80mm或75mm。CCD芯片越大则标准镜头的焦距越长。广角镜头视角90度以上,适用于拍摄距离近且范围大的景物,又能刻意夸大前景表现强烈远近感即。35mm相机的典型广角镜头是焦距28mm,视角为72度。120相机的50,40mm的镜头便相当于35mm相机的35,28mm的镜头.长焦距镜头适于拍摄距离远的景物,景深小容易使背景模糊主体突出,但体积笨重且对动态主体对焦不易。35mm相机长焦距镜头通常分为三级,135mm以下称中焦距,135-500mm称长焦距。黑龙江光学导航系统费用,可以咨询位姿科技(上海)有限公司;
从节点浮标按照自身序号信息在收到同步码后延迟预定时隙广播自身位置和探测目标的方位信息,主浮标累积该信息,以120s为周期随同步码广播利用累积信息计算的目标运动参数及自身位置,各浮标接收该信息后进行空间对准并获取目标位置。母船应按照正多边形布置浮标,若浮标自带动力可航行,各浮标航路终点的拓扑结构为正多边形。按照测量孔径原理,浮标的优布置位置呈直线等间隔布置且直线方向与目标航向一致,这种布置能保证测量精度达到优,但实际使用时目标航向是未知的,在这种条件下,优的拓扑结构仍为正多边形布置,原因如下:1)保证目标以任何航向航行或机动时,浮标阵的综合孔径大;2)若浮标无动力,可大程度节约布放母船的航行距离,若浮标有动力,可大程度节约多个浮标总体的航行距离,有利于浮标同时出水工作;3)各浮标综合通信距离短,有利于各浮标的无线自组织网络构建。图4多光学浮标联合定位信息流程图4联合定位计算结果与分析非线性小二乘法定位效果理论上可采用Cramer-Rao界值分析,即式(5)中H(tk)TH(tk)矩阵的逆矩阵主对角线元素[12]。实际工程中,定位误差不来源于测量的随机误差,也来源于,是各误差综合叠加的结果,很难以数学解析的形式描述。云南光学导航系统费用,可以咨询位姿科技(上海)有限公司;普陀区的光学导航联系电话
山西光学导航系统费用,可以咨询位姿科技(上海)有限公司;静安区光学导航公司联系电话
这里的控制点是指能够确定一个逆向反射标记物2三维空间坐标(世界坐标系中)位置,同时也能够确定该逆向反射标记物2相对于感测装置5的坐标位置。三维空间坐标位置指工具上逆向反射标记物2的三维坐标,相对于感测装置5的坐标位置为逆向反射标记物2在感测装置5中生成的图像上的高斯光心位置。p3p问题可以转化为一个四面体形状的确定问题。已知条件为知道三个以上逆向反射标记物2在世界坐标系中的位置,以及在感测装置5的相机投影坐标,求棱长边的问题。通过余弦定理,再利用点云配准方法就可以得到感测装置5的坐标系相对于世界坐标系的平移以及旋转。确定了逆向反射标记物2的位置,可以基于逆向反射标记物2与**工具前列上的物体(例如,手术刀等)的位置之间的已知关系,来确定**工具前列的位置。以上结合附图详细描述了本公开的推荐实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复。静安区光学导航公司联系电话
文章来源地址: http://yiqiyibiao.cmgdjgsb.chanpin818.com/gxyq/qtgxyq/deta_12915006.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。